-
車廂車底檢測機器人系統
• 單臂機器人檢測過程
• 雙臂機器人檢測過程
• 電客車車底檢測機器人系統是由視覺機器人、中心服務器、手持移動終端三大模塊組成,可全自動檢測電客車底部及轉向架可視部件,實現了電客車相關故障的識別和報警。
• 該系統採用機器人、機器視覺、圖像識別等技術,對電客車車底進行自動檢測,檢測數據採用無線傳輸技術實施傳輸至中心服務器進行分析、診斷,通過手持終端實現故障發布、確認和處理結果回傳,可實現單獨或人機結合的方式進行作業,具有良好的擴展性和交互性。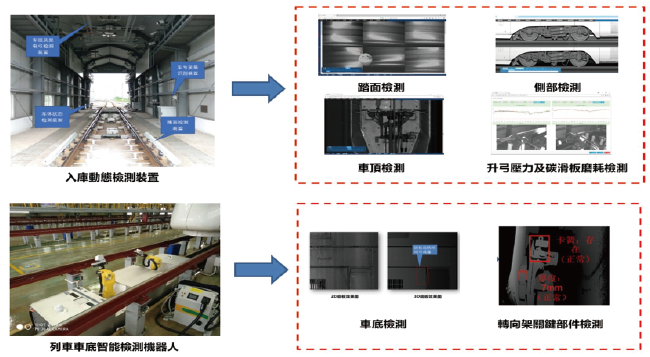
•系统功能:
1) 系統可以全自動操作,可實現軌道檢測車自動行走到檢測位置,自動檢測,檢測完畢後自動歸位,並自動充電,無需人工干預。
2) 系統運行方向的2端能檢測設備前後方向20米以內的障礙物,並自動報警。機器臂上需安裝專業機器人防撞器,確保電客車安全。系統巡行方向的2端配備防撞裝置,如有觸碰可緊急制停。
3) 系統充電裝配備2種,1種是固定充電樁可實現自動充電,另一種為移動充電樁可用於應急。
4) 系統可以高精度定位到電客車上每個關鍵部件。同時採集並融合電客車的二維信息和三維信息。可快速掃描電客車底部可視部件,包含車體底部部件及中間連接部。採用6軸機械臂具備閘片磨耗、撒沙管和排障器高度測量功能。使用雙機械臂結構,並且每個機械臂都可以通過升降台實現高度控制。
5) 系統通過EMC認證,可以在電客車帶電的情況下作業。
6) 系統配備列位檢測裝置,可自動識別該軌道上的電客車車號及端位信息。
7) 系統配置手持機2台,內裝系統專用軟件,可以實現機器人操控,並且可以查看和處理機器人檢測到的電客車故障。系統配備平台軟件,可實時現實出設備當前作業狀態,機器人運行位置、檢測數據及電客車故障報警等信息。